IRS: A Large Synthetic Indoor Robotics Stereo Dataset for Disparity and Surface Normal Estimation
IRS is an open dataset for indoor robotics vision tasks, especially disparity and surface normal estimation. It contains totally 103,316 samples covering a wide range of indoor scenes, such as home, office, store and restaurant.
 |
 |
|---|---|
| Left image | Right image |
 |
 |
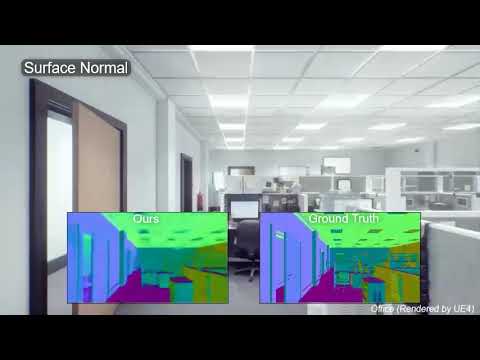
| Disparity map | Surface normal map |
| Rendering Characteristic | Options |
|---|---|
| indoor scene class | home(31145), office(43417), restaurant(22058), store(6696) |
| object class | desk, chair, sofa, glass, mirror, bed, bedside table, lamp, wardrobe, etc. |
| brightness | over-exposure(>1300), darkness(>1700) |
| light behavior | bloom(>1700), lens flare(>1700), glass transmission(>3600), mirror reflection(>3600) |
We give some sample of different indoor scene characteristics as follows.
 |
 |
 |
|---|---|---|
| Home | Office | Restaurant |
 |
 |
 |
| Normal light | Over exposure | Darkness |
 |
 |
 |
| Glass | Mirror | Metal |
We design a novel network, namely DispNormNet, to estimate the disparity map and surface normal map together of the input stereo images. DispNormNet is comprised of two modules, DispNetC and NormNetDF. DispNetC is identical to that in this paper and produces the disparity map. NormNetDF produces the normal map and is similar to DispNetS. "DF" indicates disparity feature fusion, which we found important to produce accurate surface normal maps.
 DispNormNet
DispNormNet
Q. Wang,1, S. Zheng,1, Q. Yan*,2, F. Deng2, K. Zhao†,1, X. Chu†,1.
IRS : A Large Synthetic Indoor Robotics Stereo Dataset for Disparity and Surface Normal Estimation. [preprint]
* indicates equal contribution. † indicates corresponding authors.1Department of Computer Science, Hong Kong Baptist University. 2School of Geodesy and Geomatics, Wuhan University.
You can use the following BaiduYun link to download our dataset. More download links, including Google Drive and OneDrive, will be provided soon.
BaiduYun: https://pan.baidu.com/s/1VKVVdljNdhoyJ8JdQUCwKQ
Please contact us at [email protected] if you have any question.