Робот разрабатывался для удовлетворения основных целей:
-
простота конструкции и сборки
-
минимальная и относительно дешевая комплектация
-
широкие возможности для изменений/апгрейдов
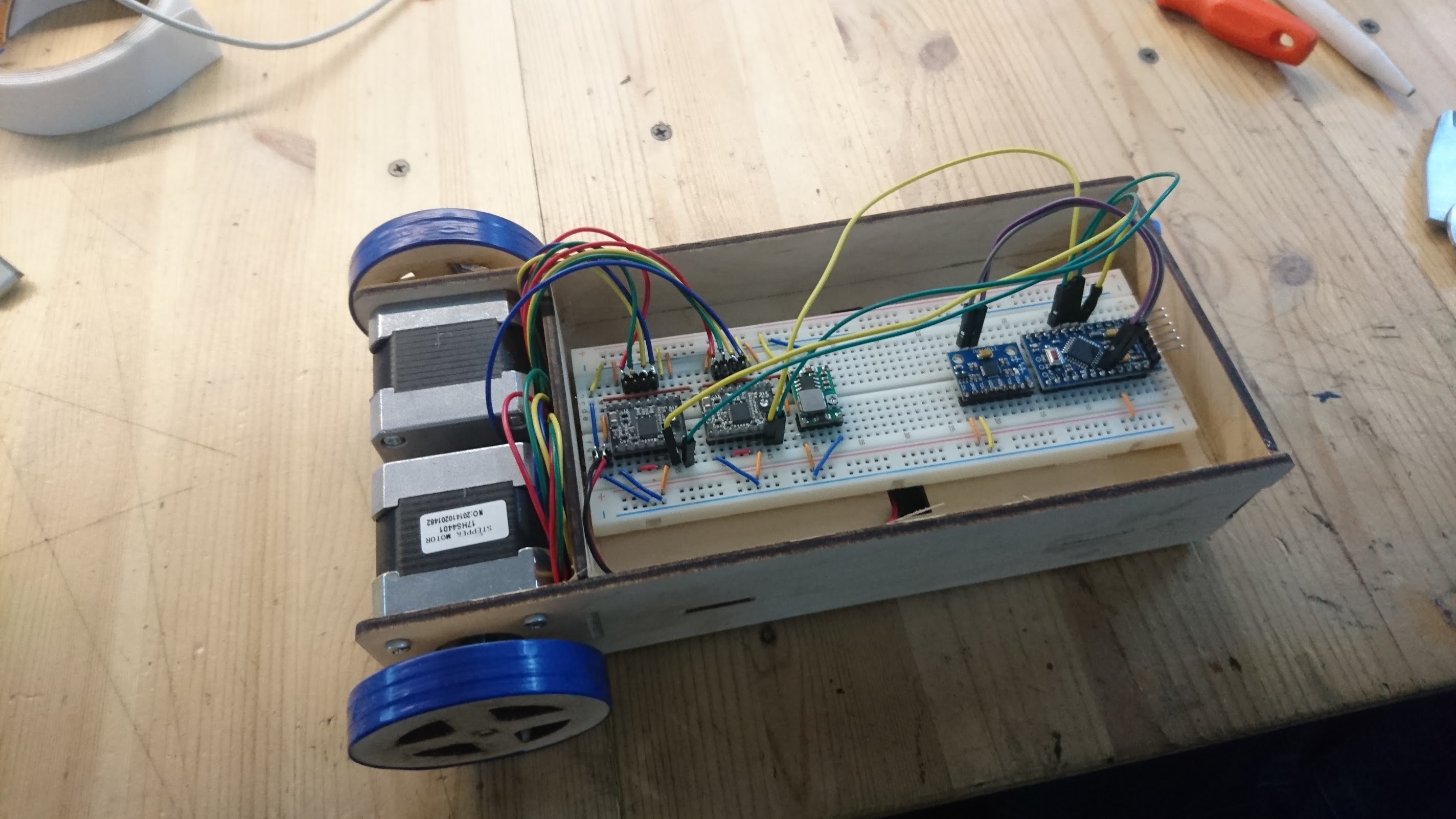
В роботе вместо простых асинхронных используются более дорогие шаговые двигатели. Это обусловлено простотой настройки, высокой мощностью и точностью работы. Их не нужно будет согласовывать между собой, им не нужны редукторы, просто вставил и поехал. Можно использовать любые шаговики расчитанные на ток до 1.5 А. Корпус сделан под типоразмер NEMA17 но можно использовать более мощные NEMA23.
Корпус расчитан под лазерную резку минимального формата, но при этом позволяет разместить внутри стандартную макетную плату либо большую печатку размерами до 120х170. Так же копсус имеет два отдельных отсека что позволяет разместить схему и батарейки по разные стороны от оси, тем самым обеспечить более правильную балансировку по весу.
При сборке робота для более качественной работы пид контроллера стоит размещать аккумуляторы в самой верхней части.
Есть несколько возможных вариантов сделать корпус, например:
- корпус вырезанный из листового материала фанеры или акрила самый быстрый и проверенный способ. Раскрой для этого - курпус в формате svg. Необходимые размеры материала 30х40см, толщина 3-4мм
- корпус напечатанный на 3д принтере самый сложный, долгий но самый крутой вариант. Необходимо самостоятельно моделировать и печатать корпус.
{kind=link}
Есть несколько возможных вариантов собрать схему, например:
-
на контактной макетной плате самый быстрый, но самый ненадежный вариант детальки при падениях постоянно вываливаются. (макетка не входит в комплект)
-
паять на печатной макетке самый надежный но при этом самый трудоемкий вариант (печатка в комплект не входит)
-
навесной монтаж компромиссный вариант - просто проводками спаивать узлы между собой, затем на термоклей цеплять внутрь корпуса.