MIT Racecar Workspace
Dockerfiles folder includes dockerfiles for building the workspace environment which contains ROS, ROS-Gazebo and other dependencies.
Navigate to one of the ros-distros kinetic or melodic in the Dockerfiles folder and build the image:
docker build -t racecar/platform .
Run the image with volume mounted of this repository and connect to VNC with your browser https://localhost:6080/
docker run -v "`pwd`/racecar_ws:/home/ubuntu/racecar_ws/src/" -it --rm -p 6080:80 racecar/platform
After the image is mounted ssh into the container and build the catkin worspaces
cd /home/ubuntu/racecar_ws
catkin_make
Folder structure:
/home/ubuntu/racecar_ws/src/CMakeLists.txtracecar_simulator/racecar_gazebo/racecar_controller/package n
To use the image in the browser, navigate to http://localhost:6080/. Hit the "Connect" button and you're in!

Launch ROS by running:
cd /home/ubuntu/racecar_ws
source devel/setup.bash
roscore
You can launch it by running:
roslaunch racecar_simulator simulate.launch
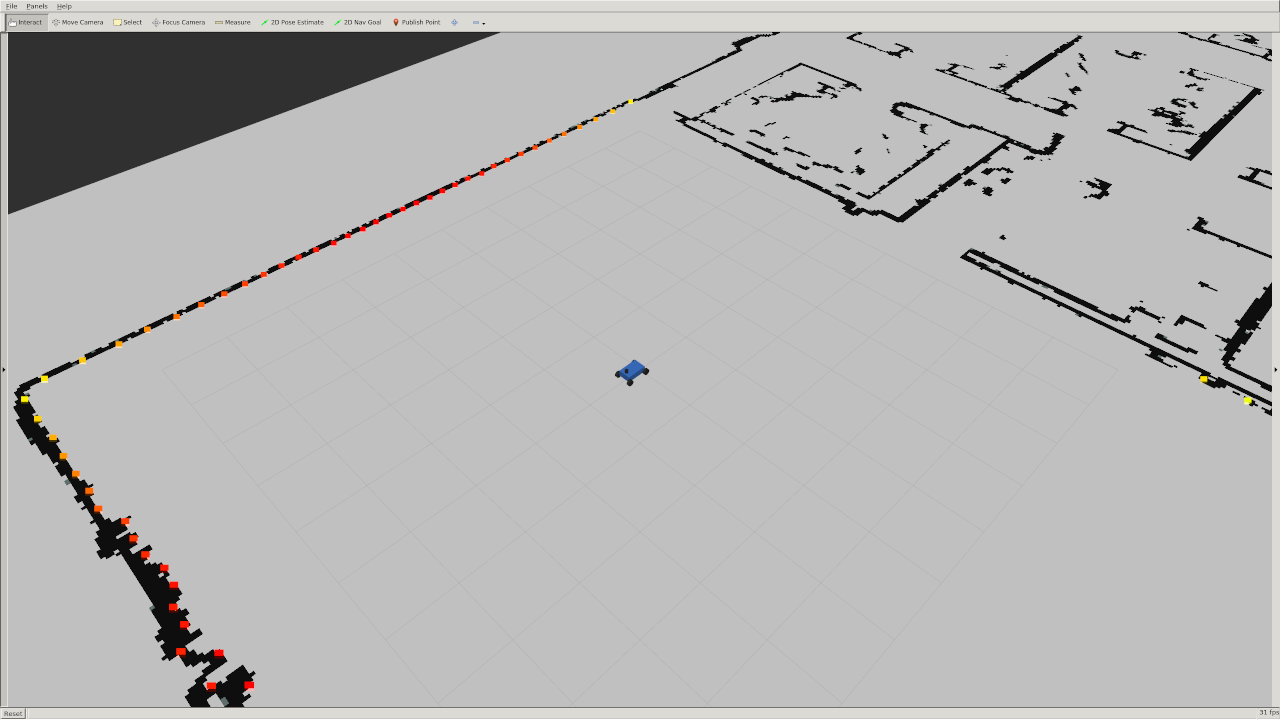
To see the simulated car, you will need to open rviz by typing
rviz
You should see a car in a map (walls are black, empty space is grey) and points on that map representing the points hit by the car's lidar.
Launch Gazebo simulator by running:
cd /home/ubuntu/racecar_ws
source devel/setup.bash
roslaunch racecar_gazebo racecar_tunnel.launch