diff --git a/README.md b/README.md
index 1855e340..c5137db1 100644
--- a/README.md
+++ b/README.md
@@ -67,7 +67,7 @@ To compile the project:
- `$ roslaunch path_planning rtab_mapping_navigation.launch`
-  +
+  🚙 Bon Voyage 😀
diff --git a/media/.DS_Store b/media/.DS_Store
index fbab687c..17d150a0 100644
Binary files a/media/.DS_Store and b/media/.DS_Store differ
diff --git a/media/path_planning_2.png b/media/path_planning_2.png
new file mode 100644
index 00000000..b3b9d617
Binary files /dev/null and b/media/path_planning_2.png differ
diff --git a/ros/README.md b/ros/README.md
index 3550fa35..402d2c84 100644
--- a/ros/README.md
+++ b/ros/README.md
@@ -1,8 +1,8 @@
-# Important ROS Information
+# ROS Information
Below you will find information about all the ROS packages, nodes, topics used in this project.
## Packages & Nodes
-Here is a list of packages. Underneath each package are nodes in that package.
+Here is a list of packages. Underneath each package are nodes in that package.
------------------------------
@@ -70,16 +70,14 @@ Semantic segmentation node. Deep learning, ConvNets
##### Subscribes
- `/camera_node/image_raw`
-------------------------------
-
-### camera
+
------------------------------
@@ -116,7 +114,7 @@ The logger node records and compiles a dataset for supervised machine learning p
------------------------------
-### osm_cartography
+
### topics for visualization
- /visual/steering/angle_img
diff --git a/ros/src/.DS_Store b/ros/src/.DS_Store
index c70083b1..80039b2b 100644
Binary files a/ros/src/.DS_Store and b/ros/src/.DS_Store differ
diff --git a/ros/src/navigation/README.md b/ros/src/navigation/README.md
index adc6d058..db61771a 100644
--- a/ros/src/navigation/README.md
+++ b/ros/src/navigation/README.md
@@ -9,9 +9,7 @@
## The Navigation Stack
-
-
🚙 Bon Voyage 😀
diff --git a/media/.DS_Store b/media/.DS_Store
index fbab687c..17d150a0 100644
Binary files a/media/.DS_Store and b/media/.DS_Store differ
diff --git a/media/path_planning_2.png b/media/path_planning_2.png
new file mode 100644
index 00000000..b3b9d617
Binary files /dev/null and b/media/path_planning_2.png differ
diff --git a/ros/README.md b/ros/README.md
index 3550fa35..402d2c84 100644
--- a/ros/README.md
+++ b/ros/README.md
@@ -1,8 +1,8 @@
-# Important ROS Information
+# ROS Information
Below you will find information about all the ROS packages, nodes, topics used in this project.
## Packages & Nodes
-Here is a list of packages. Underneath each package are nodes in that package.
+Here is a list of packages. Underneath each package are nodes in that package.
------------------------------
@@ -70,16 +70,14 @@ Semantic segmentation node. Deep learning, ConvNets
##### Subscribes
- `/camera_node/image_raw`
-------------------------------
-
-### camera
+
------------------------------
@@ -116,7 +114,7 @@ The logger node records and compiles a dataset for supervised machine learning p
------------------------------
-### osm_cartography
+
### topics for visualization
- /visual/steering/angle_img
diff --git a/ros/src/.DS_Store b/ros/src/.DS_Store
index c70083b1..80039b2b 100644
Binary files a/ros/src/.DS_Store and b/ros/src/.DS_Store differ
diff --git a/ros/src/navigation/README.md b/ros/src/navigation/README.md
index adc6d058..db61771a 100644
--- a/ros/src/navigation/README.md
+++ b/ros/src/navigation/README.md
@@ -9,9 +9,7 @@
## The Navigation Stack
-
-  -
+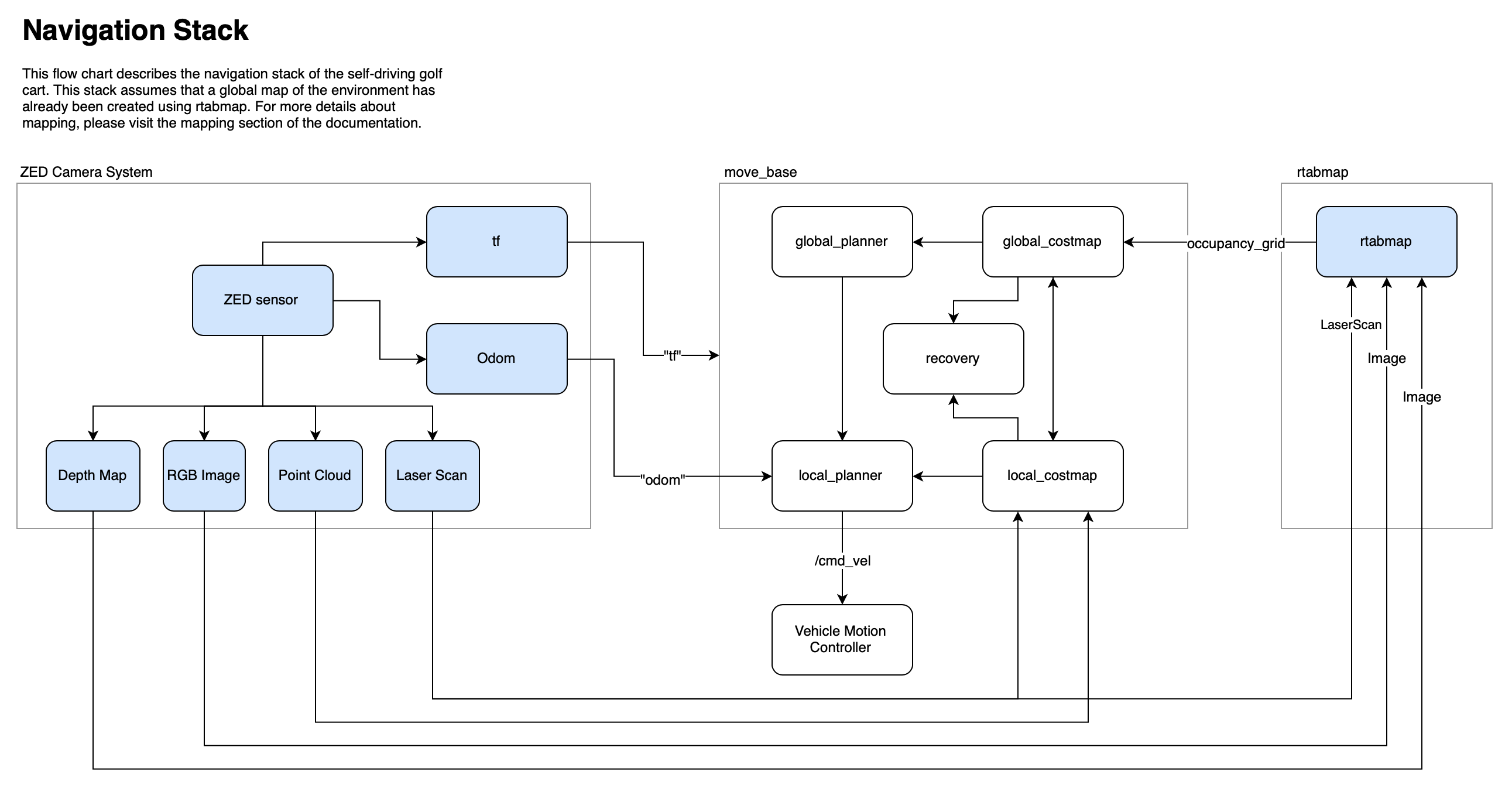
The self-driving vehicle uses a modified version of the ROS navigation stack. The flowchart above illustrate the mapping and path planning process. First, I create a detailed map of the environment with `rtabmap_ros`. With that global map, I use the localization feature of `rtabmap_ros` and the odom feature of the zed camera system to localize and plan paths.
@@ -19,10 +17,10 @@ The self-driving vehicle uses a modified version of the ROS navigation stack. Th
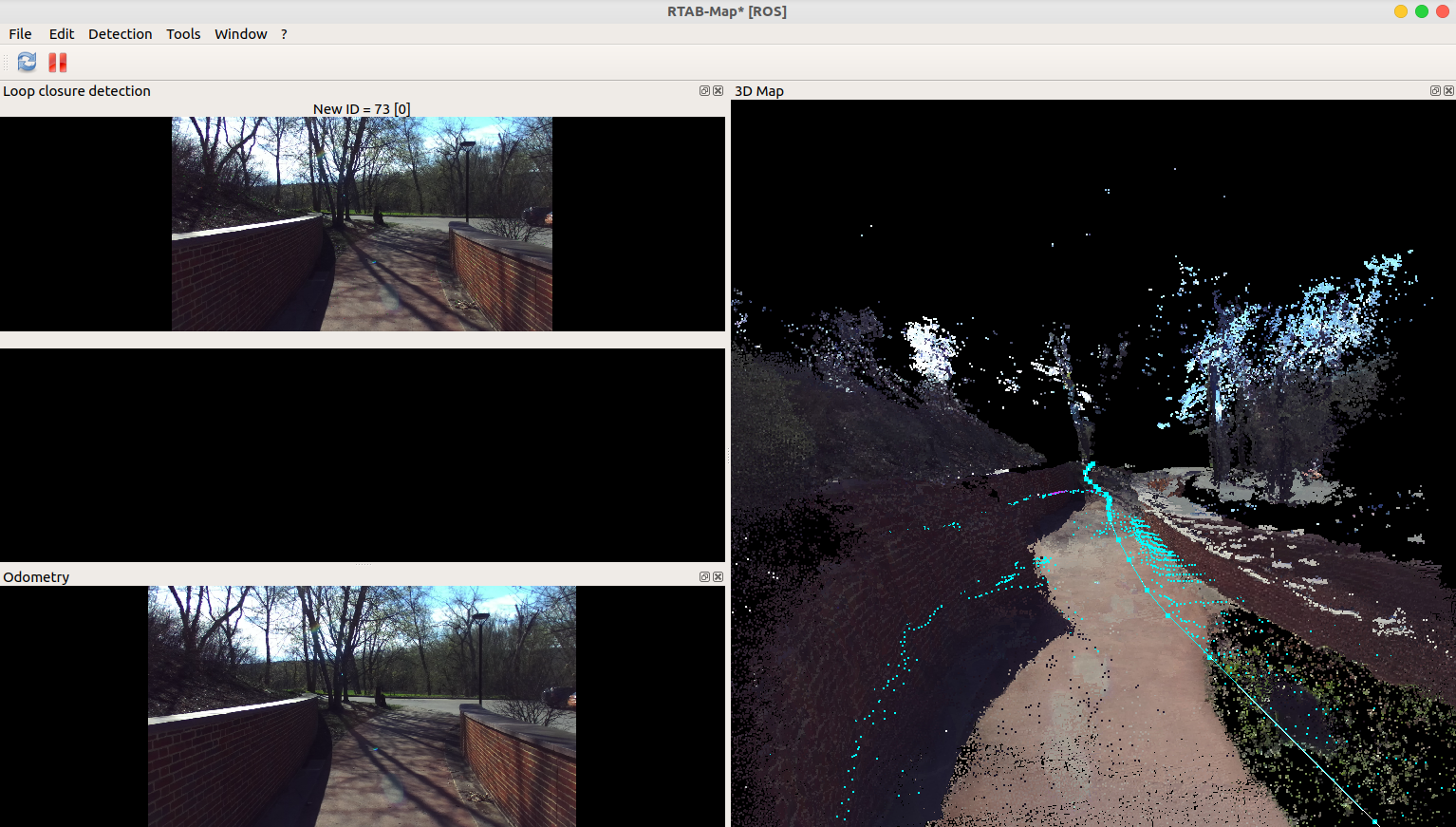
### RTABMap
-`rtabmap` (realtime appearance based mapping) allows me to construct a global map of the environment. For more information on the mapping package, please check out this [`.launch` file](./ros/src/navigation/mapping/launch/rtab_mapping.launch).
+`rtabmap` (realtime appearance based mapping) allows me to construct a global map of the environment. RTABMap is also used to initialize the location of the vehicle. For more information on the mapping package, please check out this [`.launch` file](./ros/src/navigation/mapping/launch/rtab_mapping.launch) or their [ROS wiki website](http://wiki.ros.org/rtabmap_ros).
-
-
+
The self-driving vehicle uses a modified version of the ROS navigation stack. The flowchart above illustrate the mapping and path planning process. First, I create a detailed map of the environment with `rtabmap_ros`. With that global map, I use the localization feature of `rtabmap_ros` and the odom feature of the zed camera system to localize and plan paths.
@@ -19,10 +17,10 @@ The self-driving vehicle uses a modified version of the ROS navigation stack. Th
### RTABMap
-`rtabmap` (realtime appearance based mapping) allows me to construct a global map of the environment. For more information on the mapping package, please check out this [`.launch` file](./ros/src/navigation/mapping/launch/rtab_mapping.launch).
+`rtabmap` (realtime appearance based mapping) allows me to construct a global map of the environment. RTABMap is also used to initialize the location of the vehicle. For more information on the mapping package, please check out this [`.launch` file](./ros/src/navigation/mapping/launch/rtab_mapping.launch) or their [ROS wiki website](http://wiki.ros.org/rtabmap_ros).
-  +
+  @@ -32,27 +30,23 @@ The self-driving vehicle uses a modified version of the ROS navigation stack. Th
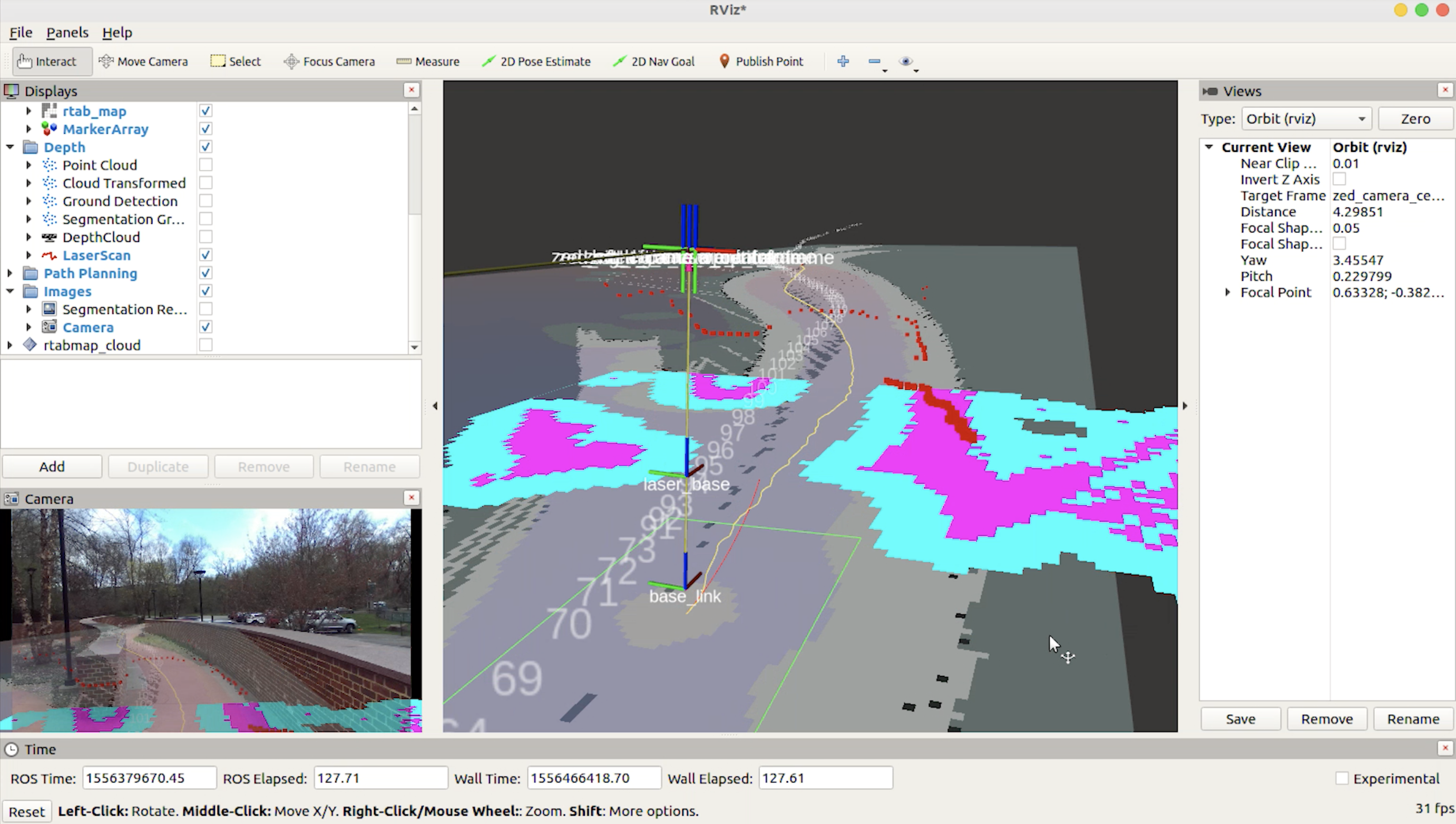
The project uses the [`move_base`](http://wiki.ros.org/move_base) node from the navigation stack. The image below shows the costmap (in blue and purple), and the global occupancy grid (in black and gray). `move_base` also plans the local and global path. Global paths are shown in green and yellow below. You can find the `yaml` files [here](./ros/src/navigation/path_planning/params).
-
@@ -32,27 +30,23 @@ The self-driving vehicle uses a modified version of the ROS navigation stack. Th
The project uses the [`move_base`](http://wiki.ros.org/move_base) node from the navigation stack. The image below shows the costmap (in blue and purple), and the global occupancy grid (in black and gray). `move_base` also plans the local and global path. Global paths are shown in green and yellow below. You can find the `yaml` files [here](./ros/src/navigation/path_planning/params).
-  +
+  ### Vehicle Motion Control
-The move base node publishes `/cmd_vel` commands, which are processed and sent directly to the vehicle.
+The move base node publishes `/cmd_vel` commands, which are processed and sent directly to the vehicle. There are two Arduinos on the golf cart that control steering, acceleration and braking.
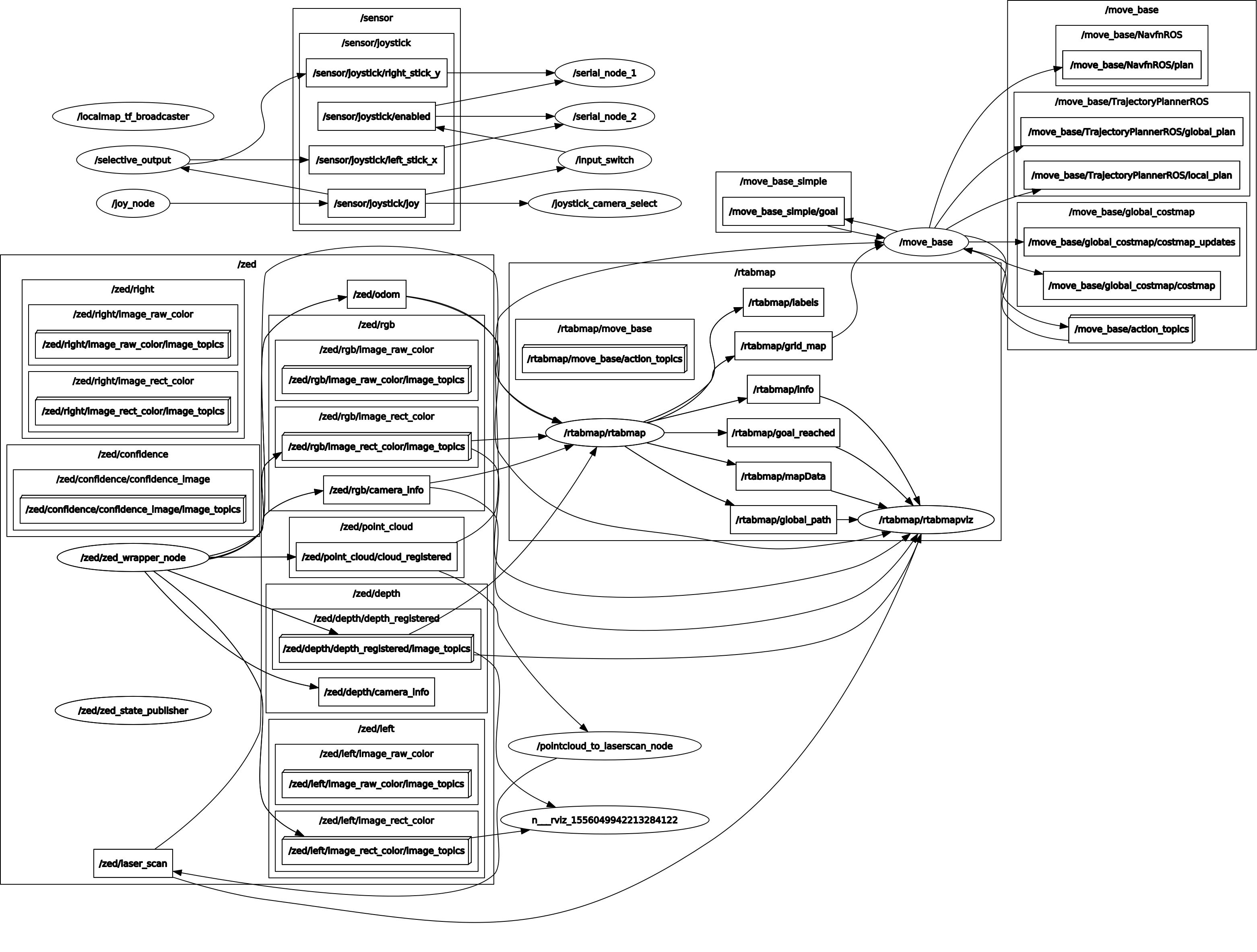
# rqt_graph
-
### Vehicle Motion Control
-The move base node publishes `/cmd_vel` commands, which are processed and sent directly to the vehicle.
+The move base node publishes `/cmd_vel` commands, which are processed and sent directly to the vehicle. There are two Arduinos on the golf cart that control steering, acceleration and braking.
# rqt_graph
-  +
+  # Contact / Info
If you are interested in the detailed development process of this project, you can visit Neil's blog at [neilnie.com](https://neilnie.com) to find out more about it. Neil will make sure to keep you posted about all of the latest development on the club.
-**Developers:**
-
-
# Contact / Info
If you are interested in the detailed development process of this project, you can visit Neil's blog at [neilnie.com](https://neilnie.com) to find out more about it. Neil will make sure to keep you posted about all of the latest development on the club.
-**Developers:**
-
- -
**Neil (Yongyang) Nie** | [Email](mailto:yongyang.nie@gmail.com) | [Github](https://www.github.com/NeilNie) | [Website](neilnie.com) | [Linkedin](https://www.linkedin.com/in/yongyang-neil-nie-896204118/)
\ No newline at end of file
-
**Neil (Yongyang) Nie** | [Email](mailto:yongyang.nie@gmail.com) | [Github](https://www.github.com/NeilNie) | [Website](neilnie.com) | [Linkedin](https://www.linkedin.com/in/yongyang-neil-nie-896204118/)
\ No newline at end of file