Research Track for Robot Rngineering
Author Szymon Zinkowicz
First assignment for Research Track 1
The simulator requires a Python 2.7 installation, the pygame library, PyPyBox2D, and PyYAML.
Type in console:
python2 run.py finalAssignment.py
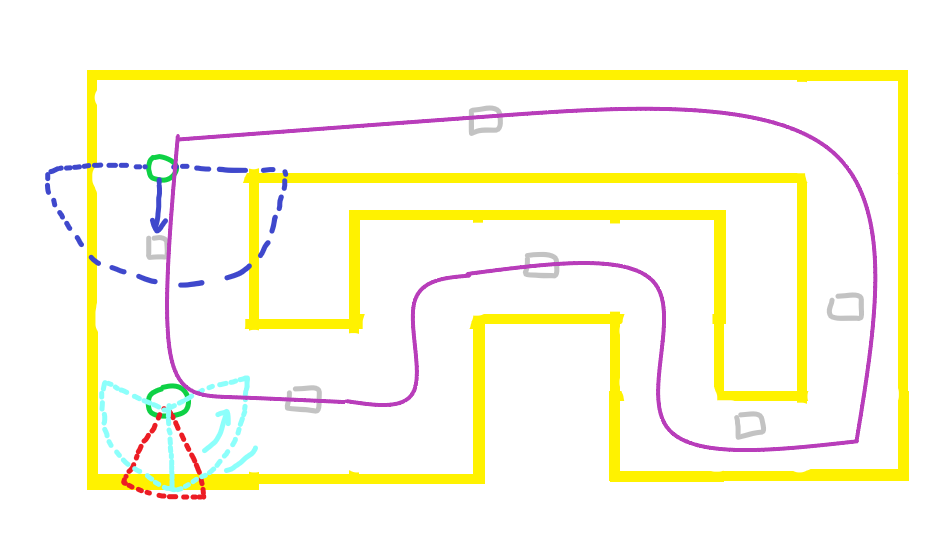
Tasks for the robot:
- constrantly drive the robot around the circuit in the counter clockwise direction
- avoid touching the golden boxes
- when the robot is close to a silver box, it should grab it, and move it behind itself
Due to a bug of the arena it was not possible to run the robot with creating a map for the its movement. Sort of "reactive" behaviour was invented as the robot either must almost bump into gold markers at 90 deg and then using pre-destined instructions turn left or right OR scan for distance of the markers on both sides and turn where the distance is longer.
In this implementation the second version was used. Robot constantly scans the area in certain radius in from of him and on the sides. The most important aspect of this implementation is to turn and move at the same time since only by that it is possible to move out the robot out of "close zone" to the golden markers.
while True
filter out silvers and golds from markers
check for the closest silvers and golds
scan for surroundings and calculate the mean distance for left and right
if silver token is near
drive to silver token and perform the grab
elif mean of the left distance is higher:
if distance to front obstacle is long
turn to left slower
else
turn to left
elif mean of the right distance is higher:
if distance to front obstacle is long
turn to right slower
else
turn to right
else
drive forward
:)