-
Notifications
You must be signed in to change notification settings - Fork 68
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
Showing
6 changed files
with
13 additions
and
21 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Binary file not shown.
{kind=link}
Loading
Sorry, something went wrong. Reload?
Sorry, we cannot display this file.
Sorry, this file is invalid so it cannot be displayed.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Binary file not shown.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
|
|
@@ -9,20 +9,18 @@ | |
|
|
||
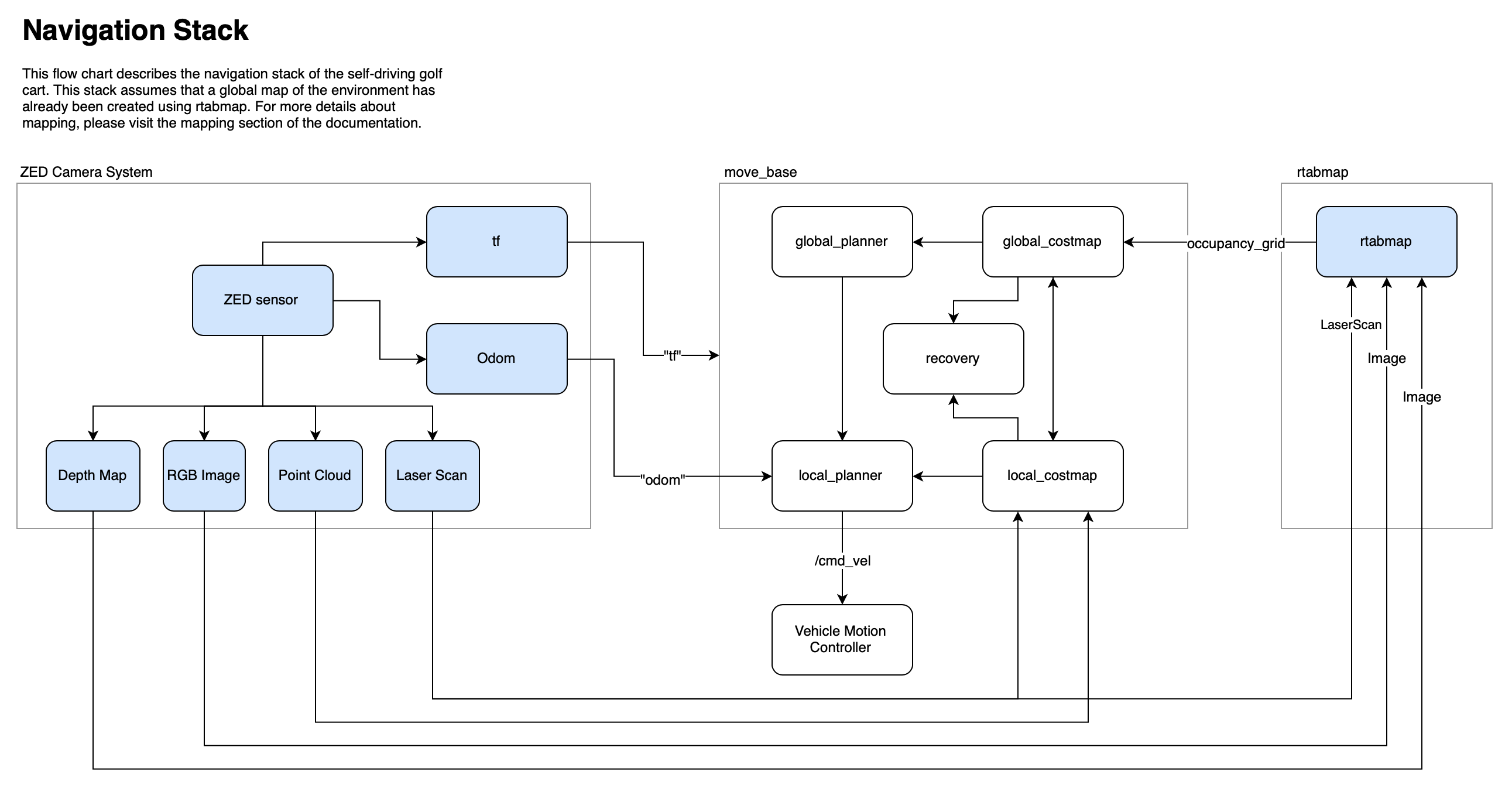
| ## The Navigation Stack | ||
|
|
||
| <center> | ||
| <img src="https://github.com/sigmaai/self-driving-golf-cart/media/nav_stack.png" alt="Drawing" width="640"/> | ||
| </center> | ||
|  | ||
|
|
||
| The self-driving vehicle uses a modified version of the ROS navigation stack. The flowchart above illustrate the mapping and path planning process. First, I create a detailed map of the environment with `rtabmap_ros`. With that global map, I use the localization feature of `rtabmap_ros` and the odom feature of the zed camera system to localize and plan paths. | ||
|
|
||
| <a name="RTABMap" > </a> | ||
|
|
||
| ### RTABMap | ||
|
|
||
| `rtabmap` (realtime appearance based mapping) allows me to construct a global map of the environment. For more information on the mapping package, please check out this [`.launch` file](./ros/src/navigation/mapping/launch/rtab_mapping.launch). | ||
| `rtabmap` (realtime appearance based mapping) allows me to construct a global map of the environment. RTABMap is also used to initialize the location of the vehicle. For more information on the mapping package, please check out this [`.launch` file](./ros/src/navigation/mapping/launch/rtab_mapping.launch) or their [ROS wiki website](http://wiki.ros.org/rtabmap_ros). | ||
|
|
||
| <center> | ||
| <img src="https://github.com/sigmaai/self-driving-golf-cart/media/rtab-map.png" alt="Drawing" width="640"/> | ||
| <img src="https://raw.githubusercontent.com/sigmaai/self-driving-golf-cart/master/media/rtab-map.png" alt="Drawing" width="640"/> | ||
| </center> | ||
|
|
||
| <a name="Path%20Planning" > </a> | ||
|
|
@@ -32,27 +30,23 @@ The self-driving vehicle uses a modified version of the ROS navigation stack. Th | |
| The project uses the [`move_base`](http://wiki.ros.org/move_base) node from the navigation stack. The image below shows the costmap (in blue and purple), and the global occupancy grid (in black and gray). `move_base` also plans the local and global path. Global paths are shown in green and yellow below. You can find the `yaml` files [here](./ros/src/navigation/path_planning/params). | ||
|
|
||
| <center> | ||
| <img src="https://github.com/sigmaai/self-driving-golf-cart/media/path_plan_1.png" alt="Drawing" width="640"/> | ||
| <img src="https://raw.githubusercontent.com/sigmaai/self-driving-golf-cart/master/media/path_plan_1.png" alt="Drawing" width="640"/> | ||
| </center> | ||
|
|
||
| <a name="Vehicle%20Motion%20Control" > </a> | ||
|
|
||
| ### Vehicle Motion Control | ||
|
|
||
| The move base node publishes `/cmd_vel` commands, which are processed and sent directly to the vehicle. | ||
| The move base node publishes `/cmd_vel` commands, which are processed and sent directly to the vehicle. There are two Arduinos on the golf cart that control steering, acceleration and braking. | ||
|
|
||
|
|
||
| # rqt_graph | ||
|
|
||
| <center> | ||
| <img src="https://github.com/sigmaai/self-driving-golf-cart/media/rosgraph-active.png" alt="Drawing" width="640"/> | ||
| <img src="https://raw.githubusercontent.com/sigmaai/self-driving-golf-cart/master/media/rosgraph-active.png" alt="Drawing" width="640"/> | ||
| </center> | ||
|
|
||
| # Contact / Info | ||
| If you are interested in the detailed development process of this project, you can visit Neil's blog at [neilnie.com](https://neilnie.com) to find out more about it. Neil will make sure to keep you posted about all of the latest development on the club. | ||
|
|
||
| **Developers:** | ||
|
|
||
| <img src="https://github.com/sigmaai/self-driving-golf-cart/media/neil.png" alt="Drawing" width="80"/> | ||
|
|
||
| **Neil (Yongyang) Nie** | [Email](mailto:[email protected]) | [Github](https://www.github.com/NeilNie) | [Website](neilnie.com) | [Linkedin](https://www.linkedin.com/in/yongyang-neil-nie-896204118/) | ||