![]()
This code ingests the output of solar simulations, "follows the photons" through the telescope to the detector accounting for physical effects, then follows the electron-hole pairs generated in the detector, and finally applies flight-like onboard processing to make the data look like how it is stored onboard. We published more detail about this process in Mason et al. 2022. Another code repository includes our data processing pipeline, which takes the data from this stage up through all of our data product levels.
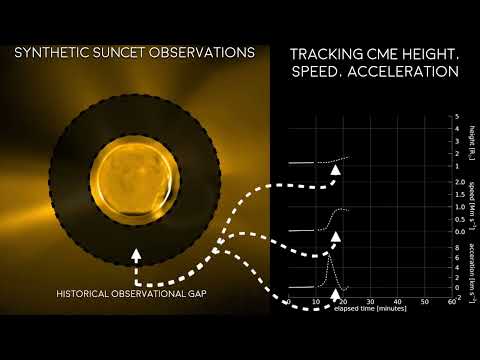
em_map_*.sav: These emission measure (EM) maps were provided by Dr. Meng Jin. These data are the result of magnetohydrodynamic (MHD) simulations of coronal mass ejections (CMEs) on the sun, following the procedure described in Jin et al. 2017, which uses the Alfvén Wave Solar Model (AWSoM; van der Holst et al. 2014) within the Space Weather Modeling Framework (Tóth et al. 2012). The files are IDL savesets. Each file corresponds to a step in time. Within each file is a set of 1024x1024 maps at 12 different temperatures, from logT = 5.4-5.5, 5.5-5.6, ... , 6.5-6.6. The emission measure is in units of cm-5.config_*.ini: This file contains the configuration for the synthetic instrument. The base fileconfig.iniis an example, with each_*.inifile being a particular configuration summarized in the filename. The file configures things like aperture size, image dimensions, short/long exposure times, and the number of images to stack for taking a median.
Note: the below is very notional as of 2022-06-13.
- Rendered extreme ultraviolet (EUV) maps: This is an intermediate output that only needs to be generated once. These files are the result of converting the
em_map_*.savfiles into EUV light with units of erg/cm2/s/pixel. signal.?: This file contains the clean signal passed through the full instrument, for all times passed in.noise.?: Same as above, except for the pure noise.synthetic_data.?: Same as above, except this is the realsitic combination of the signal and the noise.snr.?: Same as above, except this contains the signal to noise ratio (SNR) data for generating contour maps.synthetic_data_*.png: For each step in time, an image is rendered and saved to disk for quick reference. The image scaling, filtering, and color table are defined byconfig.ini.snr_*.png: For each step in time, a set of SNR contours (at levels defined byconfig.ini) are output for quick reference.synthetic_data.mov: The individual images rendered into a movie.